









Specification
| Main Parameters | FE-263113 | FE-263138 | FE-263163 | FE-263188 | |
| Voltage(VAC) | 220 | 220 | 220 | 220 | |
| Rated torque(Nm) | 95 | 150 | 210 | 250 | |
| Instant Max Torque(Nm) | 190 | 300 | 420 | 500 | |
| Torque constant(Nm/Arms) | 13.4 | 21.9 | 29.6 | 35.2 | |
| Rated Current(Arms) | 7.1 | 7.1 | 7.1 | 7.1 | |
| Instant Max Current(Arms) | 14.2 | 14.2 | 14.2 | 14.2 | |
| Resistance(Ω) | 2.7 | 3.9 | 2 | 6.7 | |
| Inductance(mH) | 8.3 | 13.4 | 7 | 22.8 | |
| Pole-pairs number(2P) | 20 | 20 | 23 | 20 | |
| Back EMF coefficient(Vrims/rad/s) | 10.9 | 17.9 | 10.1 | 28.7 | |
| Rated Output(W) | 796.5 | 943.2 | 1760.6 | 1310 | |
| Rotor inertia (10-4kg.m²) | 1000 | 1500 | 1600 | 2100 | |
| Rated Speed(rpm) | 80 | 60 | 80 | 50 | |
| Max Speed(rpm) | 150 | 120 | 150 | 100 | |
| Positioning accuracy(arc_sec) | ±20 | ±20 | ±20 | ±20 | |
| Repeat positioning accuracy(arc_sec) | ±1.5 | ±1.5 | ±1.5 | ±1.5 | |
| Encoder resolution(sin/cos) | 16384 | 16384 | 16384 | 16384 | |
| Axial load(N) | 40000 | 40000 | 40000 | 40000 | |
| Radial load(N.m) | 400 | 400 | 400 | 400 | |
| Axial runout(mm) | ≤0.005 | ≤0.005 | ≤0.005 | ≤0.005 | |
| Radial runout(mm) | ≤0.005 | ≤0.005 | ≤0.005 | ≤0.005 | |
| Weight(kg) | 24.4 | 32.5 | 44 | 49.1 | |
| Motor height(mm) | 113 | 138 | 163 | 188 | |
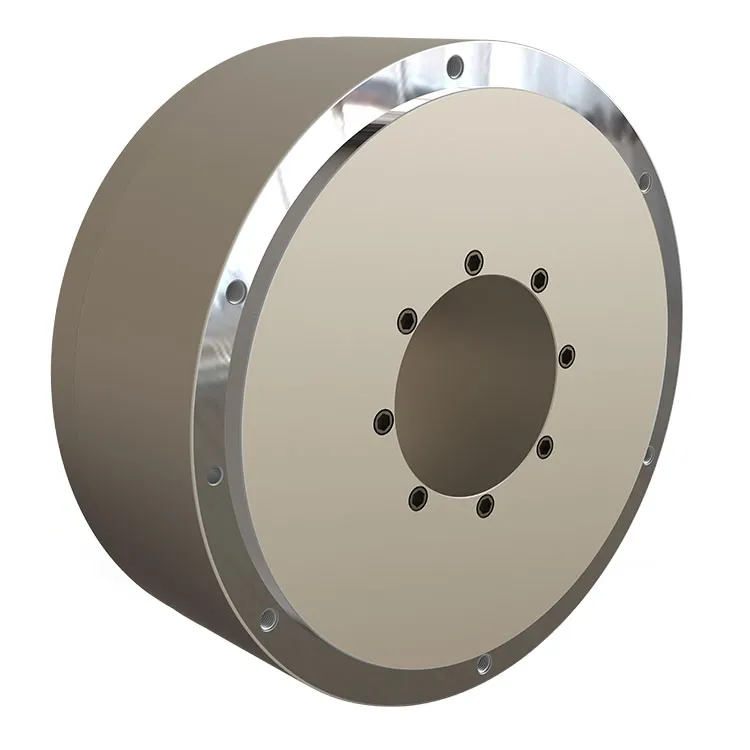
Drawing
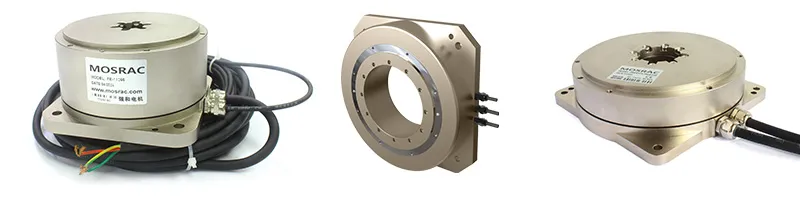
Case studies (Customized frameless motors developed with our clients)




Download

FE-263113 Torque Motor Catalog.pdf
OD: 263mm|Height: 113mm
FE-263138 Torque Motor Catalog.pdf
OD: 263mm|Height: 138mm
FE-263163 Torque Motor Catalog.pdf
OD: 263mm|Height: 163mm
FE-263188 Torque Motor Catalog.pdf
OD: 263mm|Height: 188mm
FE-263 series direct drive rotary (DDR) motor Catalog.pdf
OD: 263mm|Height: 113~138~163~188mm optional
-

-

-

-

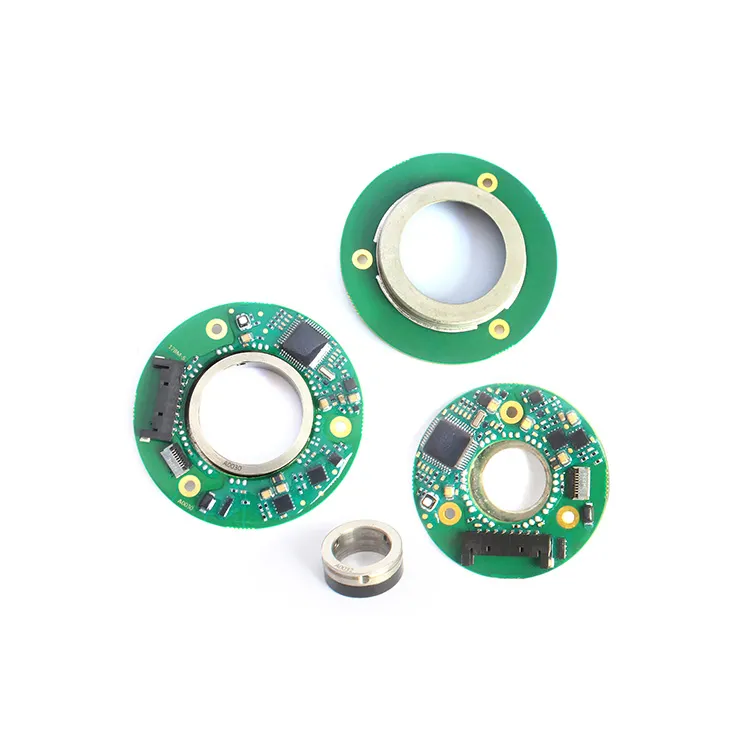
Frequently bought together - Magnetic encoders
Direct drives need high-quality position signals to ensure optimal performance. Perfect measuring signals can enhance the surface quality of machined workpieces, reduce the machine frame's vibrations, minimize velocity-dependent motor noise, and prevent excessive heat generation in the motor.
Mosrac recommends using a magnetic encoder to enhance the accuracy, speed stability, and thermal behavior of direct drive axes. Because there is no mechanical transmission between the encoder and the feed unit, the position signals are not susceptible to inaccuracies or delays.
Custom combinations are available on request and contact us.

Application case

Torque motors for robotics applications

Torque motors for consumer electronics application

Torque Motors for industrial automation application

Torque motors for medical devices application